Interface de contrôle¶
Présentation du système¶
L’interface de contrôle, ou Interface Homme-Machine (IHM) constitue le point central d’interaction entre l’utilisateur et le système de navigation. Elle permet de visualiser en temps réel la position du bateau, le cap, ainsi que les données issues de l’anémomètre et du pilote automatique.
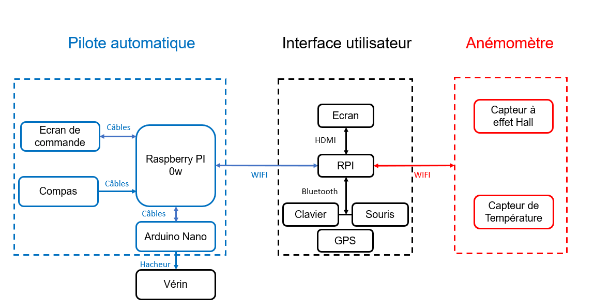
Figure 1. Rôle de l’IHM dans le système
D’un point de vue logiciel, l’IHM repose sur Signal K, qui assure la centralisation et la distribution des données entre les différents sous-systèmes. OpenCPN agit comme interface graphique principale pour la navigation et le pilotage.
Pour la partie matérielle, tout ordinateur compatible avec OpenPlotter peut être utilisé. Néanmoins, l’ensemble du système a été développé et validé sur Raspberry Pi 4, configuration que nous recommandons. Un écran, un clavier et une souris sont nécessaires pour la configuration initiale.
Montage¶
Installation d’OpenPlotter¶
L’installation d’OpenPlotter nécessite un second ordinateur afin de préparer la carte SD.
Télécharger l’image officielle d’OpenPlotter depuis le site officiel, puis utiliser un logiciel de flashage tel que Balena Etcher.
Insérer la carte SD dans le Raspberry Pi, connecter les périphériques (écran, clavier, souris), puis démarrer le système. Lors du premier lancement, configurer la langue, le clavier et la connexion internet. Une connexion internet est indispensable pour la suite de l’installation.
Installation et mise à jour des applications¶
Allez dans le panneau en haut à droite.
À moins d’être précisé autrement, l’installation des applications sera faite via l’application Settings (accessible depuis le bouton en haut à gauche). Dans Settings, cliquer sur Add sources puis sur add candidates. Si vous avez besoin à un moment ultérieur de mettre à jour une application, re-cliquez sur add candidates pour avoir les mises à jour.
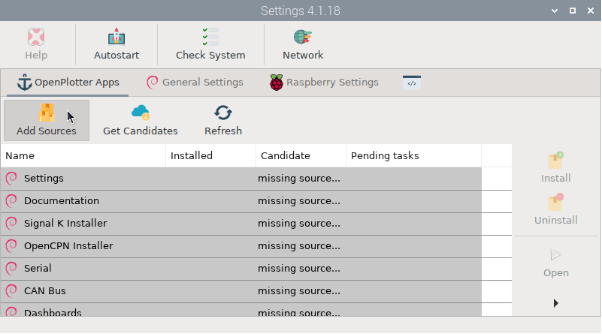
Figure 2. Applications disponibles dans OpenPlotter
Installation de Signal K¶
Dans settings, installez Signal K installer :
Une fois cet installer installé, vous pouvez vous connecter au serveur de Signal K en vous connectant ainsi :
Ouvrir Chromium (ou Firefox) et tapez https://localhost:3000 dans la barre d’adresse.
Vous pouvez aussi utiliser ceci, qui le fait pour vous.
Une fois connecté, vous avez une demande pour créer un compte administrateur, Notez les bien quelque part !
Installation d’OpenCPN¶
Comme précédemment, installez OpenCPN via settings:
Sur l’installer, cliquez sur check versions, puis dans install, sélectionnez la version Backport (c’est celle la plus à jour)
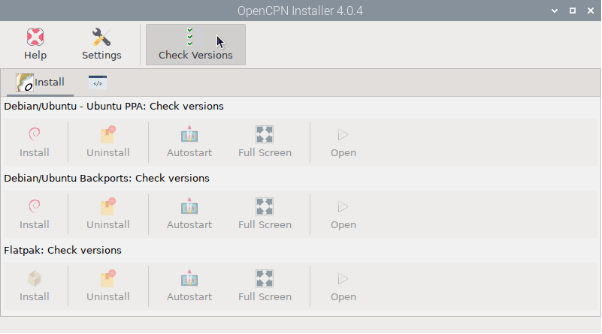
Figure 3. Installateur d’OpenCPN
Une fois OpenCPN installé, il faut connecter OpenCPN au serveur Signal K : allez dans Options puis dans Connection et dans la section “configure a new connection”, sélectionnez network.
Comme protocole, choisissez Signal k, comme adresse Localhost et comme port 3000. Laissez l’option automatic server discovery décochée (voir figure ci-dessous).
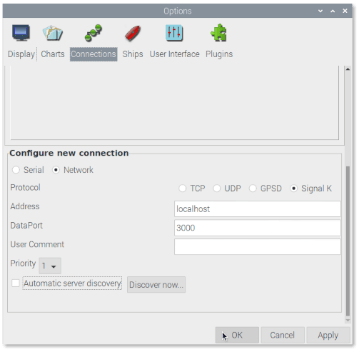
Figure 4. Connexion entre OpenCPN et Signal K
Vous pouvez de plus commencer à préparer la connexion au pilote automatique en installant le plugin pypilot.
Mise en place du Hotspot¶
Vous avez à votre disposition 2 solutions :
Pour installer le hotspot, le point d'accès wifi, vous pouvez utiliser cet installateur :
- Dans le panneau de configuration du Wifi, en haut à droite :
DansAdvanced Options>Create Wireless Hotspot>Create New Wi-Fi Hotspot(photo)
Créer le réseau Wifi : - Choisir le nom, le mot de passe (wifi security)
- Dans
Advanced Options>Edit Connections -
Sélectionner le réseau créé (photo)
-
Sélectionner :
- Band: B/G (2.4 GHz)
- Channel: 6 (2437 MHz)
Arrivé ici, nous vous invitons à installer le reste des systèmes et à revenir ici une fois cela fait.